Роботехники тратят массу времени и усилий пытаясь найти оптимальное сочетание датчиков и алгоритмов, чтобы уберечь дроны от неожиданной встречи с препятствием. Это не простая задача.
За некоторым исключением, имеющиеся сегодня любительские БПЛА быстро летают, но не имеют достаточных вычислительных возможностей и датчиков, которые позволяли бы избежать столкновений с такими препятствиями как деревья или линии электропередачи.
В лаборатории GRASP Университета Пенсильвании самое серьезное внимание уделяют созданию маневренных квадрокоптеров, способных пролетать даже в открытые форточки. Сотрудники лаборатории придумали, по-видимому, гораздо более простое решение для навигации и обхода препятствий с использованием множества маленьких воздушных роботов. Они решили поместить их в сетчатый каркас, который позволит продвигаться к цели, даже сталкиваясь с встречающимися на пути препятствиями. «Не надо думать о том, как бы пролететь и не столкнуться».
Такого рода философии придерживаются маленькие насекомые, такие как пчелы. Они не беспокоятся о столкновениях с препятствиями или друг с другом. А если это происходит, они просто не обращают на это внимания и продолжают свой путь. С точки зрения робототехника эту ситуацию можно описать и по другому. Ущерб от столкновения при столь малых размерах БПЛА невелик, а датчики и контроллеры не достаточно точны, чтобы гарантировать отсутствие столкновений при сложной траектории полета. Так что нужно отказаться от намерения пролететь без столкновений, а просто сосредоточиться на минимизации вреда при столкновении. Швейцарский стартап Flyability одним из первых продемонстрировал преимущества метода предусмотренного столкновения за счет оснащения обычного беспилотника защитным каркасом, в котором он летает через лес и ледяные пещеры.
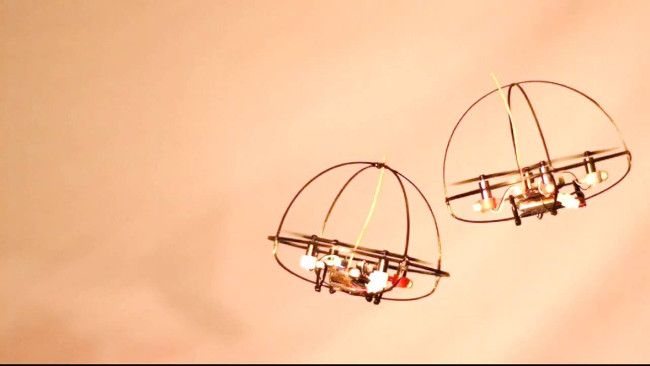
При разработке своих летательных аппаратов, группа из Пенсильвании искала биотехнологический подход, сосредоточив внимание на маленьких и упругих квадрокоптерах. В результате, была собрана воздушная флотилия из 25-граммовых, 10-сантиметровых миниатюрных квадрокоптеров. Каждый из них оснащен легким, решетчатым каркасом, изготовленным из 12000 полимеризованных нитей углеродного волокна. Мини БПЛА управляются с простого контроллера, который «не принимает во внимание позицию других роботов или препятствий, и не содержит специальных мер по упреждению столкновения», отмечают исследователи.
«Это радикально иной подход к полету, где вы просто полагаетесь на местную информацию для навигации, обладая устойчивостью к столкновениям, которые неизбежны из-за ограниченности датчиков и процессоров, - говорит профессор Виджай Кумар, - мы пытаемся сделать безопасных и умных роботов, способных работать в загроможденных помещениях». Разработчики считают, что такие беспилотники будут наиболее полезны при обследовании помещений в чрезвычайных ситуациях.
Комментарии
(0) Добавить комментарий