Летающий робот IDSC Tailsitter был разработан в швейцарском Институте динамических систем и управления как испытательный стенд для отработки новых алгоритмов управления вертолетами. Целью проекта является разработка контроллеров, которые обеспечивают гибкие и надежные режимы полета, позволяющие полноценно использовать весь потенциал этих воздушных транспортных средств.
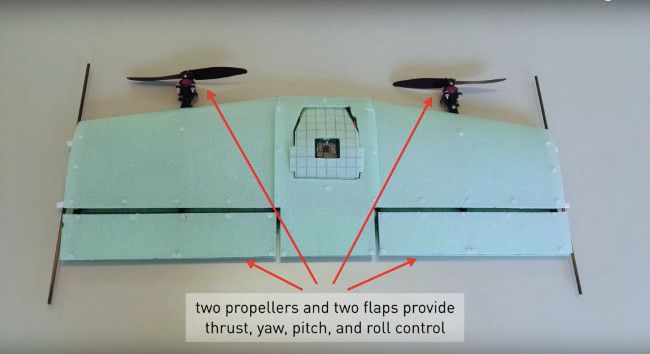
Авиационная конструкция выполнена на основе профиля Clark Y и сконструирована таким образом, что для обычного полета момент тангажа равен нулю при нулевом угле отклонения закрылков, и, таким образом, аэродинамическая нейтральная точка совпадает с центром тяжести воздушного аппарата. Данная конструкция предназначена для обеспечения гибких маневров во всех режимах полета, а также позволяет избежать проблем предельного угла отклонения закрылков, вызываемых большими углами атаки.
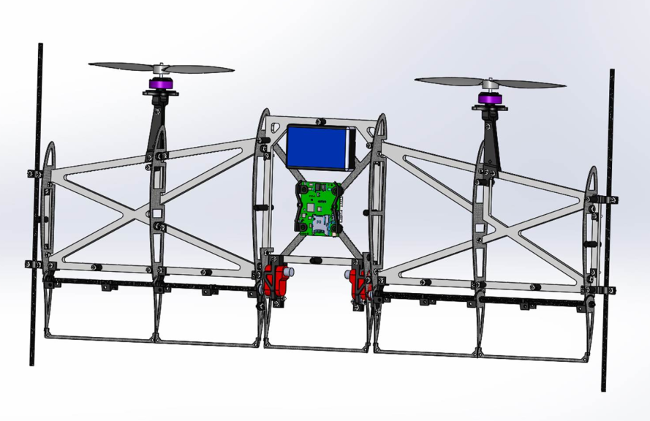
Каркас воздушного аппарата выполнен на основе углеродных, многослойных композитных материалов. Для крепления к корпусу двигателей и сервоприводов использованы 3D-печатные крепления, сервоприводы расположены таким образом, что они могут непосредственно управлять закрылками. Электроника системы управления размещена в центре аппарата, а аккумулятор спереди, таким образом, центр тяжести находится в требуемом положении. Для того, чтобы упростить замену сломанных компонентов, не используются клеевые соединения, все части соединяются винтовыми креплениями. Размах крыльев этого аппарата составляет 48 см, а общий вес 150 г.
Система управления позволяет перейти в режим зависания из любого полетного состояния. Используется сложная каскадная структура с внешним и внутренним контурами управления, позволяющими контролировать траекторию полета с помощью вычислений и сравнения с заданными параметрами. Контроллер работает с частотой обновления 500 Гц на микропроцессоре Cortex M4F. Для связи с наземной станцией управления использован чип nRF51822 от компании Nordic Semiconductor. Связь может быть использована для записи телеметрических данных или отправки команд высокого уровня, таких как «взлет» или «посадка». Тем не менее, IDSC Tailsitter способен летать и автономно по заданным заранее и сохраненным в бортовой системе траекториям.
Комментарии
(0) Добавить комментарий