Ученые из Лаборатории реактивного движения (JPL) американского космического агентства (NASA) дорабатывают сделанный по принципу геккона механизм захвата, намереваясь сделать немного менее хаотичной жизнь для тех, кто работает на борту Международной космической станции (МКС).
Неистощимые на выдумки сотрудники JPL придумали серию «якорей для космонавтов», которые можно использовать как внутри, так и снаружи станции, и даже оснастили этой технологией робота, что может обеспечить ему более безопасную работу на внешней обшивке космической станции.
Жизнь в космосе значительно сложнее, чем на Земле. Дело в том, что в космосе все становится более легким, при этом космонавты имеют внушительный арсенал приспособлений и ограждений, чтобы держаться за них. Но, это неизбежно, общий недостаток тяжести серьезно сокращает производительность. Используя биомиметический подход, ученые NASA планирует дать космонавтам новый и весьма универсальный инструмент, который позволит управлять непослушными условиями микрогравитации.
Замысел конструкции новых якорей сотрудники JPL подсмотрели, наблюдая за гекконом. В естественных условиях геккон имеет врожденную склонность к восхождениям. Благодаря замечательной эволюционной особенности, ноги рептилии покрыты миллионами волосков, которые обеспечивают сцепление на основе эффекта, известного как силы Ван-дер-Ваальса.
Силы Ван-дер-Ваальса являются необычной физической особенностью, которая возникает, когда электроны, вращающиеся вокруг ядра атома, распределяются неравномерно, что создает электрическое поле с положительным и отрицательным полюсами. Это электрическое поле создает соответствующую полярность в соседних молекулах, образуя временный, клеящийся эффект между ногами геккона и всем, к чему они прикасаются.

Создав синтетический материал, состоящий из крошечных волосков, намного тоньше, чем человеческий волос, ученые JPL смогли имитировать такие же впечатляющие способности закрепления на поверхности, как у геккона. Результатом является мощный и гибкий якорь, который можно размещать на любой плоской поверхности МКС и прикреплять, просто прижимая его к поверхности.
Ученые создали к настоящему времени якоря трех размеров: 2,5х10 см, 5х15 см и 7,6х20 см. Но теперь у специалистов из JPL начинают возникать еще более амбициозные замыслы по применению этой технологии. Одним из возможных применений будет использование захватов геккона для сбора крупных предметов космического мусора, например, верхних ступеней ракет-носителей или заброшенных спутников, чтобы способствовать усилиям по наведению порядка на низкой околоземной орбите.
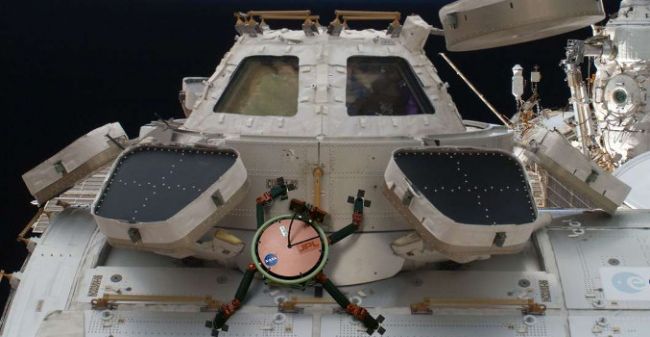
Рассматривается также применение этой технологии для будущих задач по обслуживанию спутников. А один из вариантов даже предполагает использование захватов, чтобы позволить роботам, таким как LEMUR (Limbed Excursion Mechanical Utility Robot), карабкаться по корпусу МКС и будущих космических станций, выполняя текущее обслуживание и занимаясь ремонтом.
«LEMUR может стать обезьянкой для космонавтов», - говорит инженер JPL Бретт Кеннеди, руководитель проекта. «Он может выполнять задачи, которые слишком малы и вызывают затруднения для космонавтов. Он создан для проникновения в укромные уголки космических конструкций».
Предполагается, что LEMUR по существу будет универсальным роботом, разработанным в виде многоцелевой конструкции с конечностями, пригодными для выполнения разнообразных задач. Круглый корпус робота позволяет ему двигаться в любом направлении, без необходимости переориентации. Возможно, в один прекрасный день мы увидим изучающего марсианский ландшафт Лемура, чему способствуют вездеходные возможности за счет сцепления с поверхностью.
Комментарии
(0) Добавить комментарий