Ракеты на твердом топливе – отличный способ произвести большое количество тяги один раз, но ими очень сложно управлять. Ученые из Японского агентства аэрокосмических исследований (JAXA) представили небольшого робота, который запускается в воздух с помощью одной твердотопливной ракеты.
В конструкции также предусмотрены тормозные ракеты для точной посадки и гироскопическая система, чтобы задавать направление полета и управлять движениями после приземления.
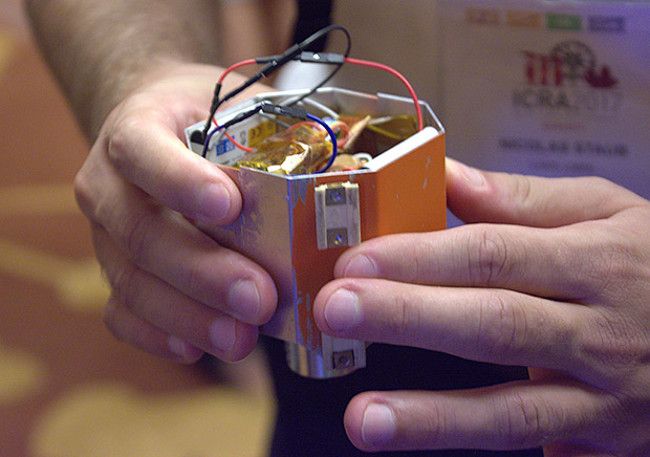
Робот весом 450 грамм состоит из корпуса с аккумуляторами и сенсорами, маховика, первичного двигателя на твердом топливе (Estes C11 с общим импульсом 10 Н·с) и двух противоположных двигателей меньшего размера. Робот располагается на рельсе под углом и во время запуска раскручивает маховик, что запускает первую ракету – робот выходит на параболическую траекторию с максимумом 30 метров. В условиях лунной гравитации этот показатель составит 200 метров.
Маховик позволяет сократить воздействие вибрации корпуса робота в полете, сохраняя прямую траекторию. Противоположные двигатели запускаются, когда траекторию необходимо изменить, например, при приземлении. Это достаточно эффективный метод: в ходе испытаний отклонение от курса сократилось с 1,2 до 0,29 метра по сравнению с механизмами без противоположных ракет. Очевидный недостаток такого робота в том, что использовать его можно только единожды. Он оборудован только одним основным двигателем, рассчитанным на разовый запуск. Тем не менее, система чрезвычайно эффективна – можно погрузить несколько таких роботов-исследователей на основную ракету или вездеход. Более крупные системы предназначены для нескольких использований, но они менее надежны и работают в небольшом радиусе.
После приземления у робота есть еще одна особенность для передвижения по поверхности – раскручивая или останавливая маховик, он может двигаться вперед-назад. Это, пожалуй, самый надежный способ передвижения, но для космических исследований у него есть еще одно преимущество – это закрытая система, которую можно герметично защитить от пыли. В этой модели робота не предусмотрены механизмы амортизации и вращающийся корпус, позволяющий получить панорамные снимки в полете. Кроме того, необходимо продумать, какие исследовательские инструменты можно поместить в таком маленьком объеме. Интересно изучить потенциал подобных роботов (или моделей меньшего размера) в условиях чрезвычайно низкой гравитации, на астероидах и небольших спутниках, где ракеты могут оказаться оптимальным способом передвижения.
Комментарии
(0) Добавить комментарий