В калифорнийском университет Беркли возникла блестящая идея использования активного хвоста, чтобы контролировать ориентацию робота в воздухе. Основная идея расширилась до применения хвостов в наземных роботах и даже роботизированных автомобилях, обретающих гипер маневренность.
Дело в том, что все эти роботы имеют много общего друг с другом и с животными в том, как их хвосты приводятся в действие. Их функционирование зависит от двигателей, позволяющих перемещать их соотвествующим образом, чтобы выполнять необходимые манипуляции с объектом. И, конечно, они управляемые, потому как, что от них толку, если их нельзя контролировать?
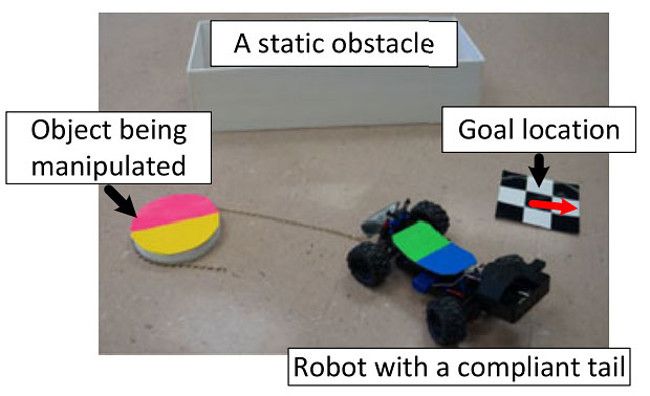
Янг-Хо Ким и Дилан А. Шелл недавно опубликовали статью «Использование хвостов для манипуляции объектами». Вместо того, чтобы использовать двигатели для приведения хвоста в действие, они подключили «гибкую канатоподобную структуру» (кусок веревки, насколько можно судить), к маленькому радио управляемому автомобилю.
Робот с хвостом выполняет «примитивы перемещения», которые позволяют хвосту манипулировать объектами путем перетаскивания или захлестывания их.
Авторы отмечают ограниченность исследований с использованием , эластичных, не активных хвостов, несмотря на то, что их так просто и дешево реализовать.
На данный момент эксперименты возможны лишь с маленькими, не слишком тяжелыми предметами, на поверхностях с относительно малым трением. Форма объекта не имеет большого значения, но поверхностные характеристики, безусловно, важны. Если задействовать, скажем, лодку, можно иметь гораздо большую свободу действий. Другая возможность иссследований заключается в масштабировании объектов, например, с автомобилем и стальным тросом.
Комментарии
(0) Добавить комментарий