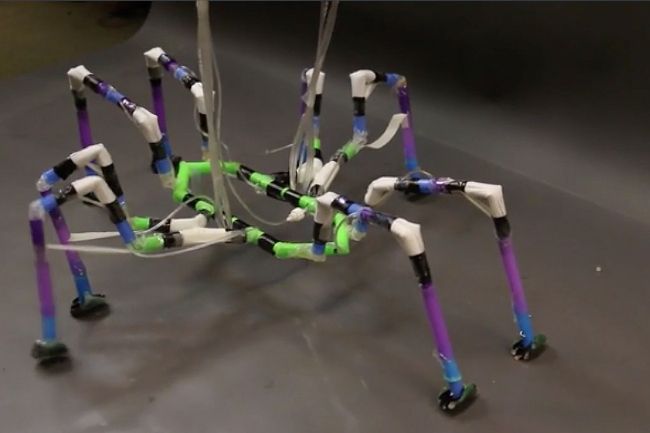
Исследователи из Гарвардского университета Джордж Уайтсайд и Джордж Уайтсайд создали наполовину мягких и способных ходить роботов по образу членистоногих насекомых и пауков. Они также сделали роботизированную водомерку, способную передвигаться по водной поверхности.
В отличие от мягких роботов предыдущего поколения, сделанных из надувных камер, которые могли лишь стоять и неловко ходить, новые роботы оказались гораздо проворнее. Хотя до реального их применения еще далеко, исследователи надеются, что такие роботы, в конечном итоге, могут быть использованы для поисковых работ в зонах стихийных бедствий или конфликтов.
В мире есть много очень гибких существ, включая пауков и насекомых, отмечают исследователи из Гарварда. Они могут быстро двигаться, взбираться на различные препятствия и способны делать то, что недоступно для больших, жестких роботов из-за их массы и размеров. Они являются одними из самых универсальных организмов на планете. Возникает вопрос, можем ли мы создать что-то подобное? Как отметил Немировский, найти ответ на этот вопрос помогла обычная соломинка для коктейлей.
Уайтсайдс и Немировский сделали насечки в соломинках, которые дали им возможность гнуться. Затем ученые вставили небольшой длины трубки, которые при накачивании заставляют сочленения ног разгибаться. Закрепляемые с обеих сторон резиновые сухожилия позволяют ноге возвращаться в исходное положение при выпускании воздуха из трубки.
Вооружившись этой простой концепцией, они вначале сконструировали способного ползать одноногого робота, а затем начали его совершенствовать. Они добавили вторую, а затем третью ногу, что уже позволило роботу стоять.
Управлять простыми роботами удавалось вручную с помощью шприцев. С усложнением конструкции понадобился микроконтроллер Arduino, который управляет воздушными клапанами и компрессором.
Хотя исследователи и смогли воспроизвести своеобразную походку муравьев, используя своего шестиногого робота, дублирование манеры передвижения паука оказалось намного сложнее.
«Самое привлекательное здесь – это простота, - говорит Немировский. - При всей сложности передвижения и целостности конструкции этих роботов, они удивительно простые в отношении сборки и управления. Используя лишь один, легко доступный материал и единую концепцию для привода, можно добиться сложного, многомерного движения».
Комментарии
(0) Добавить комментарий