
Исследователи из лаборатории Disney Research в Цюрихе и швейцарского технологического института (ETH) разработали четырехколесного робота со встроенными пропеллерами, которые позволяют ему преодолевать вертикальные поверхности.
VertiGo управляется дистанционно, подобно радиоуправляемой машинке, но он автоматически корректирует положение пропеллеров в соответствии с находящейся поблизости поверхностью. Он может перемещаться в горизонтальной и вертикальной плоскостях, используя тяговое усилие вращающихся воздушных винтов, которые также помогают этой тележке ездить по сложенной из кирпича стенке.
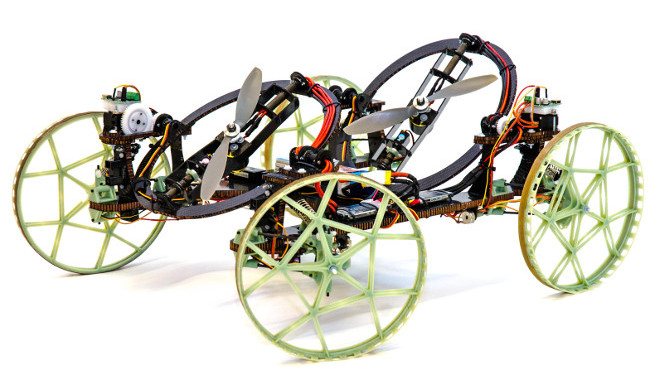
Пропеллеры расположены в центре каркаса. Каждый пропеллер устанавливается внутри концентрической, кольцеобразной рамки, которые управляются роторными двигателями, известными как сервомоторы и обеспечивающими точное позиционирование. Двигатели позволяют обеим рамкам двигаться независимо друг от друга, поэтому с изменением наклона пропеллеров меняется и ориентация робота.
«Использование двух пропеллеров вместо одного обеспечивает переход с горизонтальной поверхности на вертикальную», - говорит один из разработчиков. «Задний пропеллер прижимает тележку к стенке, в то время как передний тянет вверх, в результате чего тележка переходит на стену».
Перемещение вперед полностью обеспечивается пропеллерами, так как ни одно из четырех колес не оснащено электроприводом. Колеса постоянно имеют контакт с поверхностью, а одна пара колес может поворачиваться, поэтому оператор может удаленно управлять перемещением.
В конструкции устройства использован ряд легких материалов, чтобы обеспечить минимальный вес тележки. Центральное шасси сформировано из углеродного волокна, при этом выполненные с помощью 3D-печати элементы используют углеродные стержни для создания таких более сложных трехмерных структур, как колеса и система подвески. Конструкция включает восемь индивидуально управляемых двигателей. Вся электроника и проводники, включая бортовой компьютер, размещены на шасси.
Размещенный в центре шестиосевой инерциальный измерительный блок собирает данные о силах, действующих на тележку. Расположенные впереди два инфракрасных датчика позволяют роботу ориентироваться в пространстве. Используя эту информацию, компьютер рассчитывает оптимальные позиции для всех моторов, так что пользователь может легко управлять тележкой.
Комментарии
(0) Добавить комментарий