Когда мы думаем о программировании роботов, то уделяем основное внимание созданию программы и не обращаем внимания на задачу отправки кода из наших компьютеров к роботу. Для этого мы используем Wi-Fi или Bluetooth, или, может быть, кабели USB или Ethernet, а также разные программные интерфейсы. И сегодня это естественно, а что будет через пять лет? 10 лет? А через пятьдесят лет?
Каковы шансы, что останется какой-либо из тех компонентов, что сегодня мы используем, для того, чтобы общаться с нашими роботами? Иначе говоря, каковы шансы нормально взаимодействовать с элементами 50-летний технологии (или даже 10-летней), такой сложности, как робот?
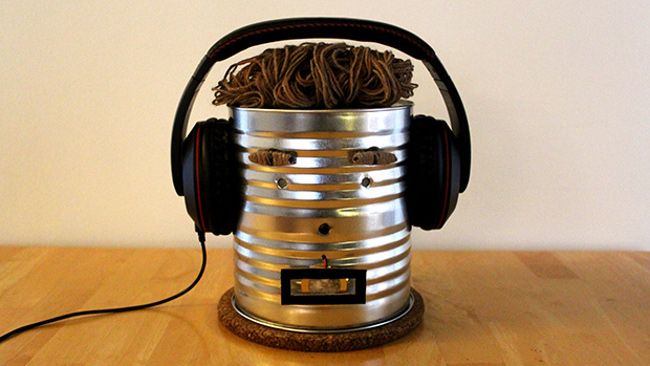
Адам Кампф, который некоторое время назад занимался робототехникой в Массачусетском технологическом институте, а теперь, делая другие полезные «примочки», беспокоится о такого рода устаревании и попытался решить проблему с помощью Canny. Canny – очень простая концепция робота, который не зависит от используемого интерфейса связи, потому что вы можете передать для него команды, используя всего лишь аудиоплеер и наушники.
«У Canny есть красные, зеленые и синие светодиоды в каждом глазу, комбинация которых позволяет отображать широкий диапазон цвета, полезный для выражения настроения или индикации состояния при программировании. Над каждым глазом есть сервопривод, который может изменить угол брови, чтобы расширить выразительность Canny. Пьезо динамик позволяет роботу воспроизводить целый диапазон нот. Когда пользователь нажимает кнопку на носу робота, он в соответствии с текущей программой воспроизводит звуки, двигает бровями и меняет цвет глаз.
Чтобы перепрограммировать Canny потребуется лишь одеть на него наушники. Датчик света в правом ухе Canny получает сигнал запуска, когда наушники включены, а микрофон в левом ухе получает серию тональных сигналов в виде частот 12,345 Гц и 9,876 Гц, с помощью которых кодируются данные. Простая схема декодирует звук, позволяя передавать данные со скоростью от 300 до 600 бит в секунду. В принципе, это супер как медленно, на таких скоростях работали старые телефонные модемы. Но смысл в том, что в любое время в будущем, до тех пор, пока люди будут использовать свои уши, можно будет легко программировать Canny с помощью наушников.
Canny, возможно, не обязательно будет роботом через 50 лет, но не в этом суть. Это испытание концепции, задуманной с целью поощрения идей о сохранении наших современных технологий и дееспособности их в будущем. Мы все понимаем необходимость создания новых роботов, которые используют преимущества последних и наиболее производительных интерфейсов, и никто не предполагает, что мы остановимся в их развитии. Но через несколько десятилетий, когда привычные роботы будут сданы в музеи, наверное, было бы здорово пообщаться с ними доступными способами.
Комментарии
(0) Добавить комментарий