Исследования и разработки роботизированных вспомогательных технологий получили огромный импульс в последнее десятилетие. Причиной тому стали достигнутый уровень совершенства в ряде технологий, достижения в области робототехники и искусственного интеллекта.
Для многих людей с нарушениями опорно-двигательного аппарата требуются внимательные помощники, чтобы выполнять такие простые задачи, как одевание или прием пищи. Таким образом, использование устройств, обеспечивающих независимую мобильность может оказать значительное влияние на качество их жизни.
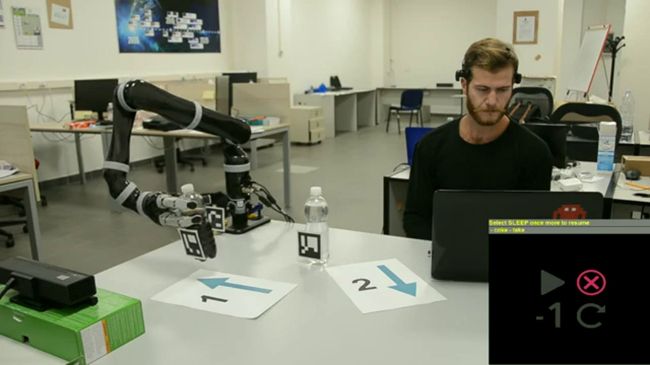
Группа исследователей из итальянского Университета Кассино работает над развитием архитектуры управления для вспомогательных робототехнических систем, работающих через интерфейс "мозг-компьютер" (BCI) для управления роботом с помощью мысли. Предложенная архитектура программного обеспечения основана на широко используемых механизмах для работы BCI и роботов (а именно, BCI2000 для управления роботом), интегрирующей модули управления, восприятия и связи, разработанные для применения с помощью руки.
В частности, с использованием структуры BCI2000, они разработали графический пользовательский интерфейс (GUI). Пользователь может выбрать объекты и действия для выполнения, сосредотачивая внимание на соответствующие мигающие иконки на экране. Путем подсчета, сколько раз значок, который он хочет выбрать, мигает, пользователь создает потенциалом, который обнаруживается через BCI и транслируется в выбранную операцию на GUI.
Сообщения, связанные с объектом и действия, выбранные с помощью графического интерфейса пользователя автоматически отправляются в манипулятор Jaco2. Архитектура управления роботом использует модуль восприятия, который позволяет обнаружить и локализовать объекты, а также лица/рот пользователя, используя датчик RGB-D (Kinect). Движение манипулятора затем контролируется, опираясь на замкнутый контур обратного кинематического алгоритма, который одновременно управляет несколькими задачами. Были выполнены предварительные эксперименты, в которых пользователь дает команду роботу через BCI, чтобы перемещать объекты на столе или выбрать бутылку, из которой он хочет пить.
Комментарии
(0) Добавить комментарий