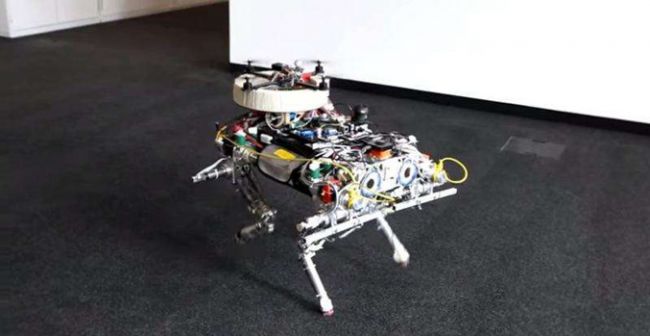
Короткий, занимательный видеоролик демонстрирует робота в виде собачки, гуляющей c квадрокоптером на поводке. Нескольких секунд в этом видео, казалось бы, достаточно на то, чтобы вдохновить любого вундеркинда от анимации на создание сценария фильма о неразлучных друзьях, в котором игрушечный вертолет следует на поводке за игрушечной собакой, но это уже другая история. Особенность этой игрушки в том, что четвероногий робот и беспилотный вертолет, перемещаясь, действуют абсолютно согласованно, и робот позволяет летательному аппарату благополучно приземлиться ему на спину.
Эта парочка представлена венчурной компанией Legged Robots Autonomous Systems на базе Высшей технической школы Цюриха (ETH Zurich). Четырехногого робота назвали StarIETH. Он может автономно ходить и даже перемещаться по любой местности. "Starl" – это пружинистый тетрапод с шарнирно-сочлененными роботизированными ногами.
По словам его создателей, этот четвероногий робот с усовершенствованным электроприводом может ходить, подниматься и даже бежать по пересеченной местности. О ногах StarlETH уже сообщали, что они могут имитировать работу мышц, накапливая, освобождая и передавая энергию. «Ловко управляя движением, робот перемещается по неровной поверхности и удачно реагирует на внешние воздействия, приседая на корточки и смещая корпус в сторону порыва ветра или противодействуя раскачивающимся движением. В отличие от других четвероногих роботов, в StarlETH работают электрические двигатели, а не громоздкие гидравлические цилиндры, поэтому он такой гладкий и ловкий (40 см в высоту, при весе 26 кг). Хотя другие четвероногие роботы и преуспевают в отдельных способностях, StarlETH старается отличаться во всем, включая энергоэффективность, универсальность, скорость и надежность».
Лаборатория робототехники и механики из Мичиганского университета описывает StarlETH, как четвероногую платформу с приводами и 12-ю степенями свободы, управляемую несколькими упругими приводами. Робот со встроенной энергосистемой и блоком вычислений способен двигаться в разной манере. Он может передвигаться подпрыгивающей походкой, бежать трусцой или еще более ускоренно.
Но что, кроме вдохновения для аниматоров, может это демо-видео рассказать о потенциальных возможностях StarlETH? Келси Д. Атертон так прокомментировал возможности этой системы: «Легко представить, как она может быть использована в спасательных работах. Мощный робот в виде собаки может ползать по завалам щебня в рухнувшем здании, а чтобы исследовать труднодоступные места поднимает в воздух примостившийся на его спине беспилотный вертолет».
Комментарии
(1) Добавить комментарий