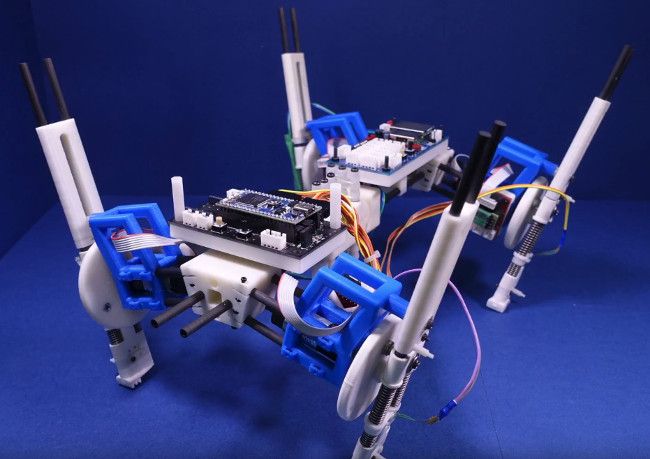
Исследовательская группа профессора Акио Исигуро из японского Университета Тохоку впервые успешно продемонстрировала, что четвероногий робот, изменяя лишь скорость, может спонтанно переходить на другой более энергоэффективный тип передвижения (особенности аллюра - походки четвероногих).
До сих пор плохо изучены особенности смены скорости и типа шага у четвероногих, известные также как передвижение трусцой, рысью, галопом. Благодаря этой работе ученые успешно продемонстрировали переходные явления при передвижении на четырех ногах. Они добились этого через децентрализованную схему управления, используя простые правила, при которых нога продолжает поддерживать вес тела, пока ощущает нагрузку на соответствующую ногу. Кроме того, они считают, что энергоэффективность схем передвижения робота может сравниваться в лошадиных силах.
Настоящая работа, как ожидается, приведет к лучшему пониманию механизма гибкой и эффективной смены четвероногими типа аллюра, когда они меняют скорость бега. Полученные результаты могут стать основой нестандартного подхода к координации нескольких степеней свободы, необходимых роботу для адаптивного типа передвижения.
Ученые полагают, что данное исследование позволит создать целый ряд применений для таких адаптивных ног роботов, работающих в районах стихийных бедствий, для ног развлекательных роботов, разработать новые автоматические алгоритмы компьютерной анимационной графики.
Комментарии
(0) Добавить комментарий