Нейрокомпьютерный интерфейс (НКИ) использует закрепленные на голове электроды для контроля электромагнитных волн мозга, которые позволяют управлять такими устройствами, как роботизированные протезы, являющиеся перспективным инструментом для помощи людям, которые из-за травмы или болезни потеряли контроль над своим опорно-двигательным аппаратом.
Тем не менее, обучение работе с НКИ может потребовать очень много времени. В статье, опубликованной недавно в журнале Nature Scientific Reports, группа специалистов показывает, как их новая система обратной связи может ускорить процесс обучения путем обнаружения сообщений об ошибках от мозга и соответствующей коррекции.
Основной проблемой, ограничивающей использование НКИ в повседневной жизни людей с ограниченными возможностями, является количество времени, необходимое для обучения пользователей, которые должны научиться модулировать свои мыслительные процессы, прежде чем сигналы их мозга станут достаточно ясными для управления внешними устройствами.
Например, чтобы двигать роботизированным протезом руки, человек должен прикладывать активные мысленные усилия, которые требуют значительно большей энергии, чем подсознательная деятельность мозга при естественном перемещении руки. Кроме того, даже после углубленной подготовки пользователи зачастую не в состоянии выполнять сложные движения.
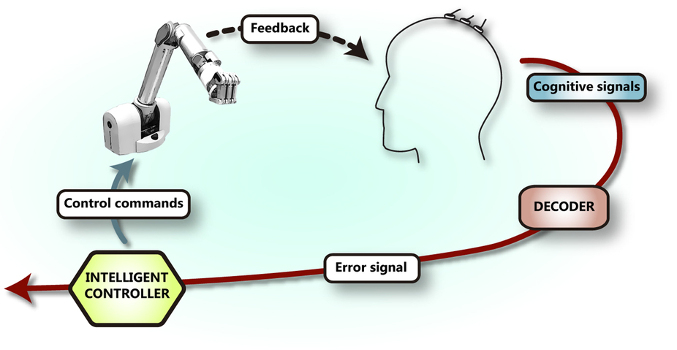
Вместе с тем, был отмечен разный тип испускаемых мозгом волн в случаях успеха или неудачи при управлении через НКИ. Учитывая этот факт, исследователи разработали новую систему обратной связи, которая фиксирует сигналы от мозга об ошибках (называемые «Ошибками возможности» или ErrP) и использует их для оценки достижения точного движения. Затем система адаптирует движение, которое с каждым повторением становится все более точным, до тех пор, пока не будет найдет правильный вариант.
Для того, чтобы определить ErrP, двенадцати испытуемым поручили наблюдать, как машина выполняет 350 отдельных движений, среди которых было запрограммировано неверное движение в 20% случаев. Этот этап занимает в среднем 25 минут. После первой стадии обучения каждый субъект выполнил три эксперимента, где они пытались найти конкретную цель с помощью роботизированной руки. Как и ожидалось, с продолжением экспериментов необходимое для поиска расчетное время сокращалось.
Этот новый подход обнаруживает очевидную применимость в нейропротезировании, особенно для людей с дегенеративными неврологическими заболеваниями, способности которых со временем меняются. Система также может позволить автоматически адаптироваться, без необходимости переподготовки или перепрограммирования.
Комментарии
(0) Добавить комментарий